Transformation of coordinate systems: software, limits and potentialities
Forest@ - Journal of Silviculture and Forest Ecology, Volume 1, Pages 128-134 (2004)
doi: https://doi.org/10.3832/efor0228-0010128
Published: Dec 28, 2004 - Copyright © 2004 SISEF
Research Articles
Guest Editors: RI.SELV.ITALIA - MiPAF Project
« Shared Research Program on Silviculture in Italy »
Collection/Special Issue: Massimo Bianchi
Abstract
The use of different reference systems has involved the need of suitable methodologies for the transformation between coordinate systems. Nowadays such a need is done strong because of the diffusion of Geographical Information Systems (GIS) and by the use of GPS. The study examines and compares some software for the automatic transformation of coordinate between reference systems adopted in Italy.
Keywords
Reference system, Coordinate, Transformation, Geographic Information Systems, GIS
Superfici di riferimento
La geodesia è la scienza che si occupa dello studio della determinazione della forma e delle dimensioni della superficie fisica della Terra. La topografia esamina gli strumenti, le tecniche di rilevamento, i calcoli e i disegni necessari per rappresentare graficamente una parte di superficie fisica della Terra su di una carta ([7]).
Gli ambiti operativi di queste due discipline sono pertanto differenti: mentre la geodesia considera la Terra nella sua interezza, la topografia limita il proprio campo di applicazione a porzioni della superficie terrestre. In entrambe i casi è comunque di fondamentale importanza l’individuazione di una superficie di riferimento.
Gli studi e le ricerche condotti sulla determinazione della superficie fisica della terra, e quindi sulla determinazione della superficie di riferimento da adottare per le operazioni di misura hanno portato nel corso degli anni alla definizione di modelli della superficie terrestre di tipo fisico e di tipo geometrico.
Tale dualismo deriva dal fatto che mentre i modelli di tipo geometrico, quali la sfera o l’ellissoide di rotazione, sono facilmente trattabili dal punto di vista matematico e risultano adatti alla costruzione di sistemi di riferimento per la determinazione della posizione di un punto per mezzo di coordinate, i modelli di tipo fisico approssimano in modo più fedele la reale forma della Terra, determinata, appunto, da una combinazione di forze fisiche.
Tra i modelli di tipo fisico il Geoide è quello che più si avvicina alla reale forma e dimensione della Terra e coincide con il pelo libero dei mari supposti in equilibrio e in assenza di azioni perturbatrici locali (moto ondoso, maree, temperatura ecc.), considerati liberi di estendersi sotto le terre emerse in modo da formare una superficie continua e chiusa, perpendicolare in ogni suo punto alla direzione della forza di gravità ([5]).
Tuttavia, pur essendo liscia, la superficie del Geoide presenta continue gobbe e ondulazioni dovute a variazioni locali della densità e delle masse terrestri che la rendono difficilmente trattabile da un punto di vista matematico.
Per questo motivo, a livello internazionale si è convenuto assumere come superficie di riferimento della Terra la superficie dell’ellissoide per il rilevamento planimetrico e quella del geoide per il rilevamento altimetrico.
Definita la superficie di riferimento, e tralasciando la componente altimetrica, la posizione di un punto sulla superficie terrestre viene espressa mediante le coordinate del corrispondente punto sull’ellissoide di riferimento. A tale scopo è però opportuno stabilire preventivamente un sistema di coordinate. In Geodesia il sistema di coordinate geografiche viene utilizzato per l’individuazione dei punti sull’ellissoide di riferimento mediante due grandezze, definite latitudine e longitudine, rispettivamente determinate come misura dei valori φ e λ, dove φ è l’angolo che la normale n all’ellissoide passante per P forma con il piano equatoriale e λ è l’angolo formato tra il meridiano di riferimento e il meridiano passante per il punto P; per convenzione è stato assunto come meridiano di riferimento quello passante per Greenwich (λ=0).
Sistemi di riferimento
Nel corso degli anni sono stati definiti numerosi ellissoidi di riferimento da adottare per le operazioni di misura, ciascuno caratterizzato dalla lunghezza del proprio semiasse maggiore a e del proprio semiasse minore b, dallo schiacciamento s e dall’eccentricità e, dove (eqn. 1, eqn. 2):
La ragione dell’esistenza di una così ampia quantità di superfici di riferimento è che la bontà con cui un ellissoide approssima la superficie del geoide varia da luogo a luogo sul globo terrestre, determinando, per ciò, la necessità di definire dei sistemi di riferimento geodetici locali al fine di contenere gli scostamenti tra le due superfici ([8]).
Nel nostro Paese l’ellissoide di Bessel (1841) è stato utilizzato per la realizzazione della prima cartografia italiana, sostituito successivamente dall’ellissoide di Heyford (1909), detto anche ellissoide Internazionale, utilizzato in parte ancora oggi per la cartografia ufficiale.
Per definire un sistema di riferimento geodetico locale occorre stabilire un ellissoide di riferimento del quale siano noti i parametri di dimensione e forma (a esempio semiasse maggiore e schiacciamento), posizionarlo e orientarlo rispetto alla superficie geoidica in un punto centrale all’area d’interesse, detto punto di emanazione, mediante la determinazione astronomica (effettuata con misure su una serie di stelle con un teodolite astronomico) delle coordinate geografiche (latitudine, longitudine) del punto di emanazione e di un azimut, misurato ancora per via astronomica, da tale punto verso una direzione prefissata. In pratica, l’ellissoide orientato localmente risulta tangente al Geoide nel punto di emanazione e rende minimi gli scostamenti tra le due superfici in tutta l’area di interesse. Inoltre, nel punto di emanazione la verticale geoidica e la normale ellissoidica coincidono ([9]).
La definizione del sistema di riferimento geodetico locale è anche legata alla istituzione di una rete geodetica fondamentale costituita da una serie di punti, omogeneamente distribuiti sull’area di interesse e materializzati al suolo, determinati attraverso misurazioni di alta precisione e procedure di compensazione degli errori.
Più recentemente, l’avvento dei sistemi di posizionamento satellitare ha portato alla definizione di un nuovo ellissoide di riferimento, geocentrico[1] e di tipo globale che ha permesso di svincolarsi dall’ambito locale tipico dei sistemi precedenti.
In ogni caso, una volta definito il sistema di riferimento geodetico in cui si opera è possibile stabilire la posizione di un punto mediante diversi sistemi di coordinate. Tra questi vari sistemi le coordinate geografiche (latitudine, longitudine) sono quelle più comunemente utilizzate.
Al fine di ottenere una rappresentazione piana della superficie ellissoidica, con i conseguenti vantaggi che questa operazione comporta in termini di semplificazione nelle operazioni di calcolo, in genere si associa al sistema di riferimento geodetico un appropriato sistema cartografico.
Sistemi di riferimento di interesse nazionale
Esclusi i sistemi di riferimento catastali presenti nel nostro Paese, sono essenzialmente tre i sistemi di riferimento geodetici di principale interesse in ambito nazionale (Roma40, European Datum 1950, World Geodetic System 1984), a ciascuno dei quali è stato associato un determinato sistema di rappresentazione cartografica ([7], [5]).
Sistema di riferimento Roma40
La nascita di questo sistema di riferimento, definito anche Sistema Nazionale, può essere fatta risalire al 1940 allorché la Commissione Geodetica Italiana, a seguito della Risoluzione del 1924 dell’Associazione Internazionale di Geodesia, decise di adottare l’ellissoide di Hayford 1909 (divenuto ellissoide internazionale nel 1924) come superficie di riferimento, i cui parametri identificativi sono:
- semiasse maggiore: a = 6378388
- schiacciamento: s = 1/297
L’Istituto Geografico Militare fu successivamente incaricato di trasformare in questo sistema le coordinate dei vertici trigonometrici riferiti a quello precedente, basato sull’ellissoide di Bessel 1841.
Nel sistema di riferimento Roma40 l’orientamento dell’ellissoide è impostato sulla verticale del punto Roma Monte Mario (con azimut su Monte Soratte), caratterizzato dai seguenti valori astronomici (definizione 1940):
- latitudine: 41°55’25.51"
- longitudine: 0° (12°27’08.40" da Greenwich)
Ai fini della rappresentazione cartografica del sistema geodetico Roma40 è stata adottata la rappresentazione conforme di Gauss-Boaga, con fattore di scala di 0.9996.
Questo sistema si compone di due fusi per la rappresentazione dell’intero territorio nazionale, ciascuno di ampiezza pari a circa 6°30’, rispettivamente indicati con la denominazione fuso “Ovest” e fuso “Est”. Il fuso Ovest si estende dal meridiano posto a 6°27’08.40’’ da Roma Monte Mario (6° da Greenwich) al meridiano 0°, passante per Roma Monte Mario (12°27’08.40’’ da Greenwich) e ha il meridiano centrale a 3°27’08.40’’ da Roma Monte Mario (9° da Greenwich). Il fuso Est si estende dal meridiano posto a 0°30’ da Roma Monte Mario (11°57’08.40’’ da Greenwich) fino a poco oltre il meridiano posto a 6°02’51.60’’ da Roma Monte Mario (18°30’ da Greenwich), in modo da includere al suo interno l’estremità orientale della penisola salentina, e ha il meridiano centrale a 2°32’51.60’’ da Roma Monte Mario (15° da Greenwich). I due fusi risultano quindi sovrapposti per 30’ in longitudine.
Per evitare di esprimere con coordinate negative punti situati a occidente dei due meridiani centrali sono state adottate due false origini pari a 1500000 metri per il fuso Ovest e 2520000 metri per il fuso Est.
Il sistema Roma40 è ancora oggi utilizzato per fini geodetici e topografici e a esso è riferita la rete italiana fondamentale di triangolazione, la Carta d’Italia al 100000 e al 25000. La maggior parte della cartografia tecnica oggi prodotta dalle regioni in formato digitale è inquadrata in tale sistema di riferimento.
Sistema di riferimento ED50 (European Datum 1950)
Nato nell’immediato secondo dopoguerra per soddisfare le esigenze di coordinare le cartografie dei vari Paesi europei, il sistema di riferimento ED50, analogamente al Roma40, utilizza l’ellisoide di Hayford quale superficie di riferimento, ma orientato in un punto nei pressi di Postdam, nel berlinese (orientamento medio europeo).
Le longitudini sono contate dal meridiano di Greenwich, le latitudini dall’equatore. Le coordinate geografiche di Roma Monte Mario in questo sistema sono:
- latitudine: 41°55’31.487’’
- longitudine: 12°27’10.930’’(da Greenwich)
La realizzazione del sistema ED50 è stata effettuata utilizzando un sottoinsieme dei vertici di 1° ordine delle reti geodetiche esistenti nei vari Paesi, sui quali è stato effettuato un calcolo di compensazione.
La rappresentazione piana del sistema geodetico ED50 avviene attraverso il sistema cartografico UTM (Universale Trasversa di Mercatore), anch’esso basato sulla rappresentazione conforme di Gauss.
Il sistema UTM prevede la suddivisione della Terra in 60 fusi aventi ciascuno ampiezza di 6° di longitudine. L’Italia ricade nei fusi 32, 33 e 34, i cui meridiani centrali si trovano rispettivamente a 9°, 15° e 21° di longitudine dal meridiano centrale di Greenwich. Il fattore di scala sul meridiano centrale è per tutti i fusi pari a 0.9996.
Anche in questo caso sono state create delle zone di sovrapposizione tra i fusi, ed è stata adottata una falsa origine per le coordinate Est, uguale per tutti i fusi, pari a 500000 metri.
Questo sistema, dotato di un ridotto grado di accuratezza, è stato utilizzato in Italia solo per scopi cartografici.
Sistema di riferimento WGS84 (World Geodetic System 1984)
Il sistema di riferimento WGS84 è un sistema globale geocentrico, definito attraverso osservazioni spaziali e costituito da una terna cartesiana destrorsa con origine coincidente con il centro di massa della Terra, l’asse Z diretto verso il polo Nord convenzionale al 1984, l’asse X passante per il meridiano di Greenwich al 1984 e l’asse Y diretto in modo da completare una terna destrorsa. A questo sistema è associato l’ellissoide WGS84, anch’esso definito attraverso osservazioni spaziali, con centro e assi coincidenti con quelli della terna cartesiana. L’ellissoide WGS84 è definito dai seguenti parametri:
- semiasse maggiore: a = 6378137
- schiacciamento: s = 1/298.257223563
La realizzazione su scala mondiale del WGS84, sistema di riferimento per i posizionamenti effettuati con strumenti GPS, è curata dal Dipartimento della Difesa degli Stati Uniti, che con una rete di stazioni a terra gestisce la costellazione di satelliti.
In ambito europeo la realizzazione del sistema WGS84 è costituito dall’ ETRS89 (EUREF Terrestrial Reference System 1989), un sistema solidale con la placca eurasiatica, definito sul terreno da una rete di punti determinati con una compensazione d’insieme delle misure satellitari e spaziali disponibili al 1989.
A livello nazionale il sistema WGS84 è stato realizzato con l’istituzione della rete geodetica tridimensionale di alta precisione, denominata IGM95, rilevata con strumenti di posizionamento GPS differenziale.
Le coordinate del punto Roma Monte Mario nel sistema WGS84 sono:
- latitudine: 41°55’27.851’’
- longitudine: 12°27’07.658’’(da Greenwich)
La rappresentazione piana del sistema WGS84 avviene attraverso il sistema cartografico UTM, descritto al paragrafo “Sistema di riferimento ED50 (European Datum 1950)”.
Trasformazioni tra sistemi di riferimento
Data la contemporanea presenza in territorio nazionale di differenti sistemi di riferimento è stato necessario disporre di metodologie che consentono di passare da un sistema all’altro con sufficiente affidabilità.
Vari sono i metodi sviluppati in passato per realizzare la trasformazione di coordinate tra i sistemi di riferimento Roma40, ED50 e WGS84. Dato che tra questi sistemi non esistono relazioni geometriche semplici, i risultati che si ottengono con i metodi di trasformazione che utilizzano formule generali possono non essere sufficientemente affidabili per le finalità perseguite. In questi casi si rende necessario il ricorso a metodi empirici stabiliti attraverso il confronto tra le coordinate di punti noti in più sistemi di riferimento ([1])
Oggigiorno l’esigenza di disporre di metodologie affidabili per la trasformazione di coordinate è divenuta ancora più forte a seguito della diffusione dei sistemi informativi geografici e delle tecniche di rilevamento satellitare, la cui applicazione coinvolge numerosi ambiti operativi e il cui utilizzo non necessariamente è affidato a personale esperto nel settore della Geodesia o della Topografia.
In questo senso, i limiti imposti delle difficoltà di calcolo nelle operazioni di trasformazione sono stati superati con la comparsa sul mercato di metodologie di trasformazione automatica, implementate in appositi software specificatamente dedicati al passaggio tra sistemi di coordinate, o come routine all’interno di software GIS (Geographical Information Systems). Tuttavia, permangono i problemi connessi alla affidabilità dei risultati ottenuti.
A tal fine vengono di seguito illustrate le caratteristiche principali di alcuni di questi software e i risultati derivanti dalla loro applicazione ad un caso di studio.
Software
I prodotti messi a confronto sono stati scelti sia in funzione delle aspettative di affidabilità dei risultati ottenibili, sia in funzione della disponibilità esistente al momento in cui questo lavoro è stato svolto.
Come indicato in precedenza, sono vari i prodotti attualmente reperibili sul mercato ed è utile distinguere tra software sviluppati per la sola operazione di trasformazione e routine implementate all’interno dei GIS, programmi informatici dedicati alla raccolta e alla manipolazione di dati geografici ([2], [4]).
Appartengono alla prima categoria i software CartLab1, CartLab2, Verto1 e Traspunto, mentre fanno parte della seconda categoria ArcGis, Idrisi e TN-ShArc.
Cartlab1 è un prodotto sviluppato a scopo didattico, che a differenza della versione professionale CartLab2 può essere gratuitamente reperito sul web. Sia CartLab1 che CartLab2 permettono di effettuare il passaggio tra i sistemi di riferimento di interesse nazionale indicati al paragrafo “Sistemi di riferimento di interesse nazionale”, incluso il sistema catastale (Cassini-Soldner).
Verto1 è il software sviluppato dall’Istituto Geografico Militare (IGM) per la conversione fra i sistemi Roma40, ED50 e WGS84. È bene precisare che il programma, che comprende gli algoritmi per il passaggio di coordinate, è venduto separatamente dai dati necessari per eseguire le trasformazioni.
Verto1 fornisce risultati considerati ufficiali dall’IGM e per questo è stato preso come riferimento nei confronti riportati di seguito nelle Tab. 1 e 2 (Tab. 1, Tab. 2).
Tab. 1 - Principali caratteristiche dei software esaminati. Per i software GIS sono indicati solo i principali formati di input/output direttamente utilizzabili nelle operazioni di trasformazione di coordinate, senza considerare i formati di import/export supportati dai vari programmi.
| Software | Sistema di riferimento disponibile | Formato dati in input | Formato dati in output |
|---|---|---|---|
| CartLab1 (vers. 1.2.2) |
Roma40; ED50; WGS84 | Singolo punto | Singolo punto |
| CartLab2 (vers. 4.1) |
Roma40; ED50; WGS84 | Ascii; SHP | Ascii; DXF; SHP |
| Verto1 (vers. 1.0) |
Roma40; ED50; WGS84 | Singolo punto Ascii; XLS |
Singolo punto Ascii; XLS |
| Traspunto (vers. 2.5.2) |
Roma40; ED50; WGS84 | Singolo punto Ascii; DXF; SHP; BMP BPW |
Singolo punto Ascii; DXF; SHP; BMP BPW |
| ArcGis (vers. 8.1) |
Roma40; ED50; WGS84 Principali sistemi internazionali |
SHP | SHP |
| IdrisiKilimanjaro (vers. 14.02) |
Roma40; ED50; WGS84 Principali sistemi internazionali |
VCT; RST | VCT; RST |
| Tn-ShArc (vers. 3.1.1) |
Roma40; ED50; WGS84 | SHP; TNP | SHP; TNP |
Tab. 2 - Risultati della prestazione dei software esaminati rispetto a Verto 1.
| Software | Residuo max (m) |
Residuo medio (m) |
Deviazione Standard (m) |
|
|---|---|---|---|---|
| Traspunto | (vers. 1.2.2) | 0.728 | 0.123 | 0.144 |
| CartLab1 | (vers. 2.5.2) | 2.690 | 1.670 | 0.473 |
| CartLab2 | (vers. 4.1) | 1.020 | 0.858 | 0.125 |
| Tn-ShArc | (vers. 3.1.1) | 15.748 | 5.211 | 4.165 |
| Idrisi | (vers. 14.02) | 13.399 | 6.179 | 2.588 |
| ArcGis | (vers. 8.1) | 13.408 | 6.174 | 2.587 |
Traspunto è un programma di conversione tra sistemi di coordinate di interesse nazionale sviluppato dal Ministero dell’Ambiente nell’ambito del Progetto Operativo Multiregionale Ambiente, ancora in versione sperimentale.
ArcGis, realizzato dalla ESRI, è un software GIS dotato di routine che consentono di effettuare la trasformazione di coordinate tra sistemi di riferimento adottati in varie parti del mondo, inclusi quelli di interesse italiano indicati al paragrafo “Sistemi di riferimento di interesse nazionale”.
Idrisi, prodotto e distribuito dalla Clark Labs, è un software GIS e di Image Processing disponibile in un unico pacchetto integrato. Al suo interno dispone di uno modulo per il passaggio tra i principali sistemi di riferimento internazionali. Per eseguire trasformazioni inerenti i sistemi Roma40 e ED50 è necessario aggiornare l’elenco dei reference file del programma, operazione che può essere effettuata con semplicità consultando l’area Download del sito ⇒ http://www.geolab.unifi.it.
TN-ShArc, interamente prodotto in Italia da Terra Nova prevede la possibilità di eseguire trasformazioni tra i sistemi di riferimento utilizzati in Italia, incluso il sistema catastale (Cassini-Soldner).
Le informazioni sui formati di input e di output supportati dai software sopra citati sono riportate in Tab. 1.
Un caso di studio
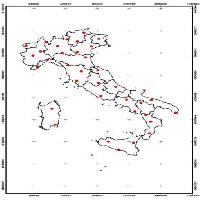
Al fine di confrontare le prestazioni offerte dai software indicati al paragrafo precedente è stata eseguita la trasformazione di coordinate di un campione di punti dal sistema di riferimento WGS84 a Roma40. Per valutare l’affidabilità delle trasformazioni era però necessario disporre di un campione costituito da punti per i quali fossero note con sufficiente precisione le coordinate nei due sistemi di riferimento. Per questo motivo è stata acquisita presso l’IGM la monografia di 36 punti appartenenti alla rete geodetica tridimensionale GPS, denominata IGM95 ([10]) scelti in modo tale da posizionare almeno un punto per regione. La monografia riporta i valori delle coordinate (geografiche e piane) sia nel sistema di riferimento WGS84, determinate con strumentazione GPS, sia nel sistema di riferimento Roma40, determinate con il software Verto 1 a partire dai valori in WGS84.
Le 36 coordinate piane nel sistema di riferimento UTM WGS84 sono state fornite in input ai vari software e trasformate in coordinate piane nel sistema di riferimento Gauss Boaga Roma40 (Fig. 1). I valori ottenuti sono stati confrontati con quelli indicati nelle monografie.
Fig. 1 - Distribuzione dei 36 punti campione.
Esaminando il valore massimo, medio e la deviazione standard degli scarti tra la posizione dei punti indicata nelle monografie e quella ottenuta con la trasformazione (Tab. 2), si osserva che:
- i software dedicati al passaggio di coordinate forniscono prestazioni superiori rispetto ai programmi GIS;
- il software sperimentale Traspunto è quello da cui si ottengono i migliori risultati (inferiori al metro);
- tra i software in commercio esaminati, CartLab2 ha fornito le prestazioni migliori, di poco inferiori (scostamento massimo di un metro) a quelle ottenute con Traspunto;
- tra i software GIS, Idrisi e ArcGis forniscono risultati analoghi (scostamento massimo di circa 13.5 metri, deviazione standard di circa 2.5 metri), migliori di quelli ottenuti con Tn-ShArc (scostamento massimo di circa 15.5 metri, deviazione standard di circa 4 metri).
- I risultati ottenuti sono paragonabili a quelli conseguiti in analoghe esperienze ([3], [6]).
Ringraziamenti
Si ringrazia il Prof. P. Corona, responsabile scientifico dell’Unità Operativa “Ri.Selv.Italia” 4.1.4, per i preziosi consigli forniti ai fini dell’impostazione delle prove sperimentali condotte.
References
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar
Google Scholar